- 22 October 2019
- علوم
 تركواز بوست
تركواز بوست- 1012
الروبوتات الصغيرة تجميع هياكل كبيرة من قطع صغيرة . قد تقوم أنظمة الروبوتات الصغيرة في يوم ما ببناء هياكل عالية الأداء ، من الطائرات إلى المستوطنات الفضائية.
يتم تصنيع الطائرات التجارية اليوم عادة على شكل أجزاء ، وغالباً ما يكون ذلك في مواقع مختلفة – فمثلاً الأجنحة يتم تصنيعها في أحد المصانع ، و أجزاء جسم الطائرة في مكان آخر ، ومكونات الذيل في مكان آخر أيضاً – و من ثم يتم نقلها إلى مصنع مركزي في طائرات شحن ضخمة للتجميع النهائي.
ولكن ماذا لو كان التجميع النهائي هو التجميع الوحيد ، حيث يتم بناء الطائرة بأكملها من مجموعة كبيرة من القطع المتطابقة الدقيقة ، والتي تم تجميعها جميعاً بواسطة جيش من الروبوتات المتناهية الصغر tiny robots ؟
روبوتات صغرية تعمل كفريق متكامل
تعد هذه هي الرؤية و التصور الذي يقوم طالب الدراسات العليا بنيامين جينيت Benjamin Jenett بمتابعته ، والذي يعمل مع البروفيسور نيل غيرينفيلد Neil Gershenfeld في مركز معهد ماساتشوستس للتكنولوجيا الجزيئات و الذرات MIT's Center for Bits and Atoms (CBA)، كأطروحة للدكتوراه التي يقوم بتحضيرها .
ولقد وصلنا الآن إلى نقطة مفادها أن إصدارات النماذج الأولية من هذه الروبوتات يمكنها تجميع الهياكل الصغيرة وحتى العمل معاً كفريق واحد لبناء مجموعات أكبر.
و يظهر العمل الجديد في عدد أكتوبر من رسائل ال IEEE لعلم الروبوتات و التشغيل الآلي IEEE Robotics and Automation Letters ، في ورقة من إعداد جينيت Jenett ، و جيرشنفيلد Gershenfeld ، وزميلة الدراسات العليا أميرة عبد الرحمن Amira Abdel-Rahman ، و وخريج CBA كينيث تشيونغ Kenneth Cheung SM '07 ، الحاصل على درجة الدكتوراه PhD '12, ، و الذي يعمل الآن في مركز أبحاث آميس التابع لوكالة ناسا NASA's Ames Research Center ، حيث يقود مشروع الأرمادا ( عبارة عن أسطول حربي من المصفحات) ARMADAS لتصميم قاعدة القمر التي من الممكن أن يتم بناؤها من خلال التجمع الروبوتي الآلي robotic assembly .
و يقول جيرشنفيلد Gershenfeld: "إن ما يكمن في صميم هذا هو نوع جديد من الروبوتات ، نسميه الروبوتات النسبية relative robots ".
ويوضح أنه من الناحية التاريخية ، كانت هناك فئتان واضحتان من الروبوتات - الفئة المصنوعة من مكونات مخصصة باهظة الثمن والتي تم تحسينها بعناية لتطبيقات معينة مثل تجميع المصانع ، وتلك المصنوعة من الوحدات النمطية غير المكلفة ذات الإنتاج الضخم مع أداء أقل من ذلك بكثير .
ومع ذلك، تعتبر الروبوتات الجديدة بديلاً لكليهما. حيث أنها أبسط بكثير من الأولى ، في حين أنها أكثر قدرة و براعة من الثانية ، ولديها القدرة على إحداث ثورة في إنتاج أنظمة واسعة النطاق ، من الطائرات إلى الجسور إلى المباني بأكملها.
نظام جديد يغني عن تتبع مواقع الروبوتات الصغيرة
وفقاً لـ جيرشنفيلد Gershenfeld ، فإن الاختلاف الرئيسي يكمن في العلاقة بين الجهاز الآلي الروبوتي والمواد التي يتعامل معها ويعالجها ببراعة . و كما يقول فإنه مع هذه الأنواع الجديدة من الروبوتات ، "لا يمكنك فصل الروبوت عن الهيكل - فهما يعملان معاً كنظام" .
وعلى سبيل المثال ، وعلى الرغم من أن معظم الروبوتات المحمولة تتطلب أنظمة تنقل دقيقة للغاية لتتبع موقعها ، فإن روبوتات التجميع الجديدة لا تحتاج إلا إلى تتبع مواقعها فيما يتعلق بالوحدات الفرعية الصغيرة ، التي تسمى فوكسل voxels ، والتي تعمل عليها حالياً.
وفي كل مرة يخطو فيها الروبوت خطوة بخطوة إلى فوكسل التالي ، فإنه يعدل من إحساسه بالموقع ، دائماً فيما يتعلق بالمكونات المحددة التي يقف عليها في الوقت الحالي .
و تتمثل الرؤية الأساسية في أنه مثلما يمكن إعادة إنتاج أكثر الصور تعقيداً باستخدام أنظمة بكسلات pixels ( و هو دقيقة من الإضاءة على شاشة العرض ، واحدة من العديد من التي تتكون منها صورة ما ) على الشاشة ، فإنه من الممكن إعادة إنشاء أي كائن مادي فعلياً كنظام أو نموذج من قطع ثلاثية أبعاد أصغر ، أو الفوكسل voxels ، والتي من الممكن أن يتم صنعها بنفسها حتى من الدعامات والعقد بسيطة.
و قد أظهر الفريق أنه يمكن ترتيب هذه المكونات البسيطة لتوزيع الأحمال بكفاءة ؛ و هي تتكون إلى حد كبير من مساحة مفتوحة بحيث يتم تقليل الوزن الكلي للهيكل .
و يمكن تجميع الوحدات ووضعها في موضع بجوار بعضها البعض عن طريق المجمعات البسيطة ، و من ثم تثبيتها معاً باستخدام أنظمة الإغلاق المدمجة في كل فوكسل voxel.
وصف أولي للروبوتات الجديدة
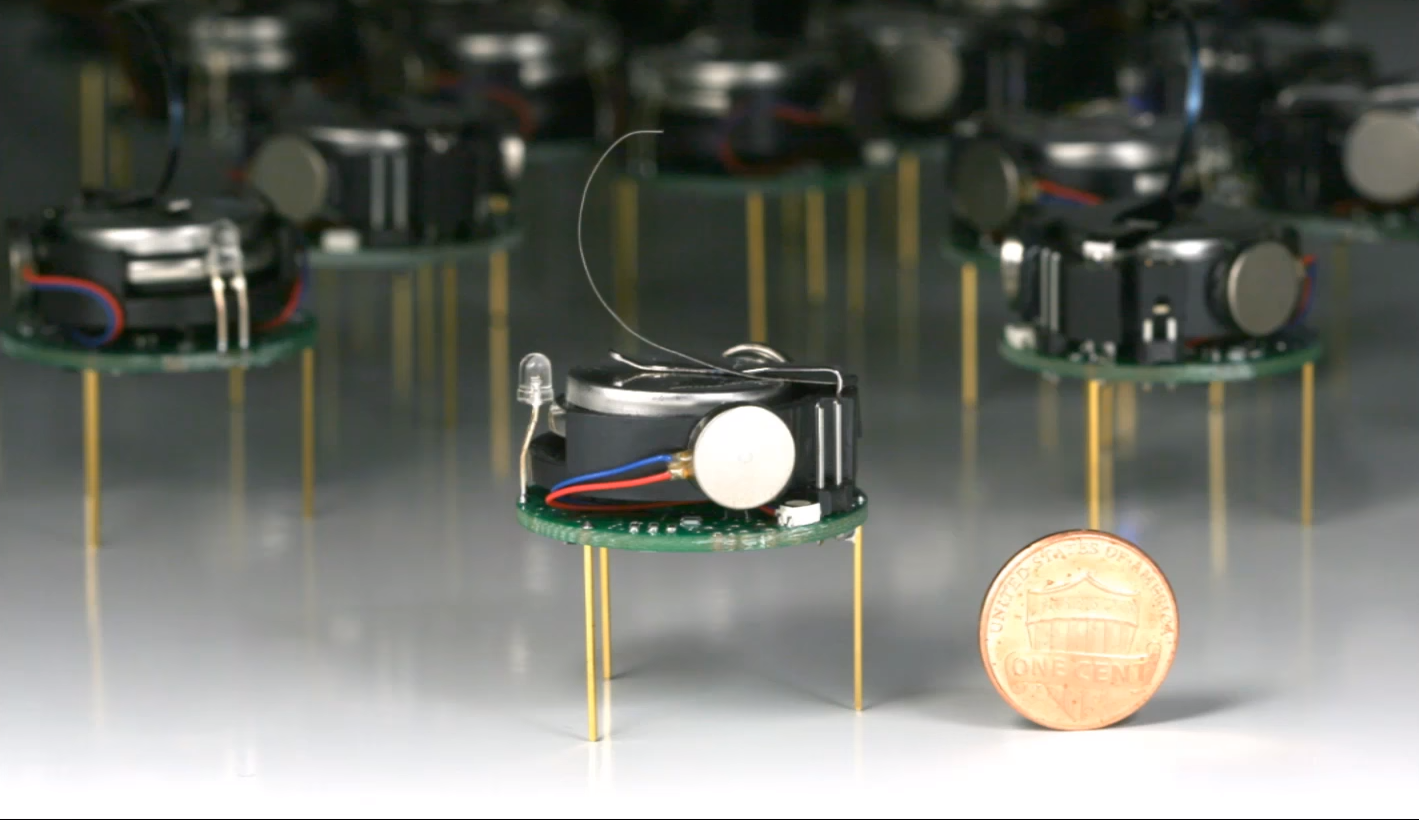
تشبه الروبوتات نفسها ذراعاً صغيراً ، مع قطعتين طويلتين معلقتين بمفصلة في المنتصف ، وأجهزة تُشبك على هياكل الفوكسل voxel في كل نهاية.
و تتحرك الأجهزة البسيطة مثل اللولبية inchworms ، وتتقدم على طول صف من الفوكسل عن طريق فتح وإغلاق أجسامها التي تكون على شكل حرف V بشكل متكرر للتنقل من واحدة إلى أخرى. و قد أطلق جينيت Jenett على الروبوتات الصغيرة بيلي BILL-E (إشارة إلى فيلم الروبوت وولي WALL-E) ، والذي يرمز إلى Bipedal Isotropic Lattice Locomoting Explorer.
المطلوب فقط معرفة الخطوة التالية
كما قام جينيت Jenett بتصميم العديد من إصدارات المجمعات كتصاميم إثبات للمفهوم ، و ذلك جنباً إلى جنب مع تصاميم فوكسل المقابلة التي تتميز بآليات الإغلاق و ذلك من أجل ربط أو فصل كل واحدة منها بسهولة عن جيرانها.
وقد استخدم هذه النماذج الأولية لإثبات تجميع الكتل في هياكل خطية ثنائية الأبعاد وثلاثية الأبعاد. ويقول جينيت Jenett بهذا الخصوص : "نحن لا نفرض الدقة أو الانضباط precision في الروبوت ؛ فالدقة تأتي من الهيكل" بينما يتخذ شكلًا بشكل تدريجي .
و يضيف جينيت Jenett قائلاً : " إن هذا مختلف عن جميع الروبوتات الأخرى. إنه يحتاج فقط إلى معرفة أين ستكون خطوتها التالية."
و كما يقول غيرشنفيلد Gershenfeld مدير CBA ، أنه بينما يقوم (الروبوت الدقيق) بالعمل على تجميع القطع ، يمكن لكل من الروبوتات الدقيقة و البالغة الصغر أن تعد و تحسب خطواتها على الهيكل .
ويتابع غيرشينفيلد أن ذلك يتيح للروبوتات إلى جانب الملاحة أو عملية التنقل navigation تصحيح الأخطاء في كل خطوة ، مما يلغي معظم تعقيدات أنظمة الروبوت النموذجية.
و هنا يقول غيرشنفيلد Gershenfeld : "إنها تفتقد إلى معظم أنظمة التحكم المعتادة ، ولكن طالما أنها لا تفوت أي خطوة ، فهي تعرف مكانها." أما بالنسبة لتطبيقات التجميع العملية ، فإنه من الممكن أن تعمل أسراب من هذه الوحدات معاً لتسريع العملية ، وذلك بفضل برنامج التحكم التي قامت أميرة عبد الرحمن بتطويره والذي يمكن أن يسمح للروبوتات بتنسيق أعمالها وتجنب إعاقة بعضها البعض .
النظام الجديد يشبه الطفل الذي يجمع قلعة من وحدات الليغو
إن هذا النوع من تجميع الهياكل الكبيرة من وحدات فرعية متطابقة باستخدام نظام روبوتي بسيط ، يشبه إلى حد كبير، الطفل الذي يجمع قلعة كبيرة من وحدات الليغو LEGO ، قد اجتذب بالفعل اهتمام بعض المستخدمين المحتملين الرئيسيين
بما في ذلك وكالة ناسا NASA ، والمتعاون مع معهد ماساتشوستس للتكنولوجيا في هذا البحث MIT's ، و شركة الفضاء الأوروبية إيرباص إس إي Airbus SE ، والتي ساعدت أيضاً في رعاية الدراسة.
و تتمثل إحدى ميزات هذا التجميع في أنه يمكن التعامل مع عمليات الإصلاح والصيانة بسهولة ، و ذلك من خلال نفس النوع من العمليات الآلية الروبوتية مثل التجميع الأولي. ويمكن تفكيك المقاطع التالفة من الهيكل واستبدالها بأخرى جديدة ، و بالتالي إنتاج هيكل قوي مثل الأصل.
ويقول جيرشنفيلد Gershenfeld : " تعد عملية التفكيك مهمة تماماً كعملية التركيب أو البناء" ، ويمكن أيضاً استخدام هذه العملية لإجراء تعديلات أو تحسينات على النظام بمرور الوقت.
و يقول جينيت Jenett: " إنه بالنسبة لمحطة فضائية space station أو المساكن القمرية lunar habitat ، فإن هذه الروبوتات ستعيش على الهيكل ، وتواصل صيانتها وإصلاحها لها ".
وفي النهاية كما يقول جيرشنفيلد Gershenfeld يمكن استخدام مثل هذه الأنظمة لأغراض عديدة مثل:
- إنشاء مبانٍ كاملة ، خاصة في البيئات الصعبة مثل الفضاء أو القمر أو المريخ.
- و يمكن لهذا أن يلغي الحاجة لشحن هياكل كبيرة مسبقة التجميع على طول الطريق من الأرض.
- و بدلاً من ذلك ، قد يكون من الممكن إرسال مجموعات كبيرة من الوحدات الفرعية الصغيرة - أو تكوينها من مواد محلية باستخدام أنظمة يمكنها تحريك هذه الوحدات الفرعية في نقطة الوصول النهائية.
وهنا يعلق جيرشنفيلد Gershenfeld قائلاً : "إذا استطعت صناعة طائرة ضخمة ، فيمكنك إنشاء مبنى".
و هكذا في هذه العملية ، يقول جيرشنفيلد Gershenfeld : " نحن نشعر أننا نكتشف مجالاً جديداً من أنظمة روبوت ذات مواد مختلطة و هجينة of hybrid material-robot systems ."
الوسوم
المؤلف

هدفنا إغناء المحتوى العربي لأن القارئ العربي يستحق المعلومة الصحيحة والمفيدة، و التي تنشر الآن في أهم المواقع العالمية ،









