- 19 April 2019
- تكنلوجيا
 تركواز بوست
تركواز بوست- 1378
الروبوت الجديد من الممكن أن يساعد الأفراد الذين يعانون من إعاقات حركية عميقة لإطعام أنفسهم أو القيام بمهام الرعاية الشخصية الروتينية مثل أن يحك جلده و استخدام غسول البشرة.
أصبح الآن بالإمكان لنظام المواءمة interface system الذي يستخدم تقنية الواقع المعزز augmented reality technology ( وهي تقنية تقوم بتركيب صورة تم إنشاؤها بواسطة الكمبيوتر على رؤية المستخدم للعالم الواقعي ، مما يوفر رؤية مركبة.) أن يساعد الأفراد الذين يعانون من إعاقات حركية عميقة في تشغيل روبوت بشري لإطعام أنفسهم وأداء مهام الرعاية الشخصية الروتينية مثل أن يحك جلده و استخدام غسول البشرة . وتعرض عملية المواءمة المستندة إلى الويب (الواجهة) web-based interface "عرضاً لعين الروبوت" robot's eye view في رؤية المحيط ، و ذلك بغية مساعدة المستخدمين على التفاعل مع العالم من خلال هذا الجهاز.
النظام الجديد.. سهولة و مرونة
و يمكن للنظام ، الذي تم وصفه في 15 مارس 2019 في مجلة PLOS ONE ، أن يساعد في جعل الروبوتات المتطورة و المعقدة أكثر فائدة للأشخاص الذين ليس لديهم خبرة في تشغيل الأنظمة الآلية المعقدة. و قد تفاعل المشاركون في الدراسة مع واجهة الروبوت باستخدام تقنيات الوصول إلى كمبيوتر المساعدة القياسية - مثل أجهزة تتبع العين وأجهزة تتبع الرأس - التي كانوا يستخدمونها بالفعل للتحكم في أجهزة الكمبيوتر الشخصية الخاصة بهم.
كما أظهرت الصحيفة التي أعلنت عن الدراستين كيف يمكن لـ "بدائل الجسم الآلية" robotic body surrogates - التي يمكنها أداء مهام مماثلة لمهام البشر - أن تحسن نوعية و جودة حياة المستخدمين لها .كما يمكن أن يوفر العمل أساساً لتطوير روبوتات أسرع وأكثر قدرة على المساعدة.
وقال فيليب غرايس Phillip Grice ، وهو خريج حديث حاصل على الدكتوراه من معهد جورجيا للتكنولوجيا Georgia Institute of Technology ، و المؤلف الأول للصحيفة : "تشير نتائجنا إلى أن الأشخاص الذين يعانون من عجز شديد في وظائفهم الحركية إلى أنه بإمكانهم تحسين نوعية حياتهم باستخدام بدائل الجسم الآلية." .و يتابع قائلاً : " لقد اتخذنا الخطوة الأولى نحو تمكين شخص ما من شراء نوع مناسب من الروبوت ، و الاحتفاظ به في منزله والاستفادة منه بشكل حقيقي ".
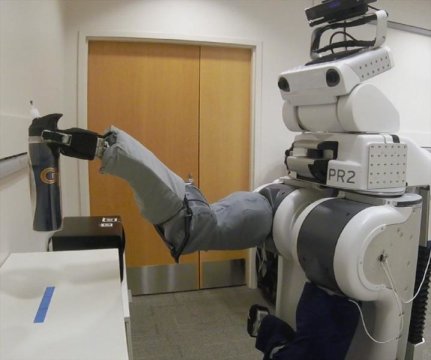
واستخدم غرايس Grice والبروفيسور تشارلي كيمب Charlie Kemp من قسم والاس كولتر للهندسة الطبية الحيوية بجامعة جورجيا للتكنولوجيا وجامعة إيموري Wallace H. Coulter Department of Biomedical Engineering at Georgia Tech and Emory University عامل متحرك PR2 المحمول و الذي قامت بتصنيعه ويلو جراج Willow Garage من أجل الدراستين. و لهذا الروبوت المتحرك بعجلات عشرين 20 درجة من حرية الحركة ، إذ أن له ذراعين و "رأس" ، مما يمنحه القدرة على التحكم في أشياء مثل زجاجات المياه ، والمناشف ، وفرشاة الشعر وحتى ماكينة الحلاقة كهربائية.
و يشرح كيمب Kemp هدفهم من صناعة هذه الروبوتات قائلاً: " إن هدفنا يكمن في منح الأشخاص ذوي الاستخدام المحدود لأجسادهم إمكانية الوصول إلى أجسام آلية تمكنهم من التفاعل مع العالم بطرق جديدة".
الدراسة الأولى:
و في دراستهم الأولى ، قام كل من غرايس Grice وكيمب Kemp بتوفير الـ PR2 عبر الإنترنت لمجموعة تتألف من خمسة عشرة 15 مشاركاً يعانون من إعاقات حركية شديدة. حيث تعلم المشاركون التحكم في الروبوت عن بعد ، وذلك باستخدام معداتهم المساعدة الخاصة لتشغيل مؤشر الماوس لتنفيذ مهمة العناية الشخصية. وتمكن 80% من المشاركين من التعامل مع الروبوت للحصول على زجاجة ماء وإحضارها إلى فم تمثال عارضة أزياء.
و عقب غرايس Grice على عملهم بقوله : "
تعتبر قدرات الروبوت محدودة إذا ما قورنت بقدرات الأشخاص الأصحاء ". و يضيف: "إلا أن المشاركين تمكنوا من أداء المهام بفعالية وأظهروا تحسناً في التقييم السريري الذي يقيس قدرتهم على التعامل مع الأشياء مقارنة بما كان بإمكانهم القيام به دون الروبوت."
الدراسة الثانية:
أما في الدراسة الثانية ، فقد قام الباحثون بتقديم كل من نظام PR2 ونظام المواءمة interface system إلى هنري إيفانز Henry Evans ، وهو رجل كاليفورنيا California الذي ساعد الباحثين من معهد جورجيا للتكنولوجيا Georgia Tech researchers على دراسة وتحسين النظم الروبوتية المساعدة منذ عام 2011. و قد اختبر إيفانز Evans ،والذي يملك سيطرة محدودة للغاية على جسده ، الروبوت في منزله لمدة سبعة أيام ، و لم يقم بإكمال المهام الموكلة إليه فحسب ، ولكنه استنبط استخدامات جديدة أيضاً تجمع بين تشغيل ذراعي الروبوت في نفس الوقت - باستخدام ذراع واحدة للتحكم في قطعة قماش و الذراع الأخرى لاستخدام الفرشاة.
بعضاً من آراء مستخدمي التقنية الجديدة
وقال إيفانز يصف نظام الروبوت : " لقد منحني النظام حرية كبيرة ، حيث مكّنني ذلك من التعامل مع بيئتي بشكل مستقل لأول مرة منذ إصابتي بالسكتة الدماغية". و يتابع وصف تجربته قائلاً : "وفيما يتعلق بالأشخاص الآخرين ، فقد شعرت بسعادة غامرة لرؤية فيل Phil يحصل على نتائج إيجابية بشكل ساحق عندما قام باختبار النظام بشكل موضوعي مع خمسة عشرة 15 شخصاً آخر."
و شعر الباحثون بالرضا و السعادة إثر قيام إيفانز Evans بتطوير استخدامات جديدة للروبوت ، حيث تم دمج حركة الذراعين بطرق لم يتوقعوها.
و يقول غرايس : " لقد وجد هنري فرصاً جديدة لاستخدام الروبوت لم نكن نتوقعها ، و ذلك في الوقت الذي منحناه فيه حرية الوصول إليه مدة أسبوع كامل ". و يضيف : "إن هذا مهم لأن الكثير من التكنولوجيا المساعدة المتاحة اليوم مصممة لأغراض محددة للغاية. إذ أن ما أظهره هنري هو أن هذا النظام قوي في تقديم المساعدة و تمكين المستخدمين من استعماله . كما أنه و من المحتمل ان تكون الفرص المتاحة لذلك واسعة للغاية."
و قد سمحت عملية المواءمة interface لإيفانز Evans برعاية نفسه في السرير لفترة طويلة من الزمن. حيث يعلق على ذلك قائلاً : " لقد كان الجانب الأكثر فائدة في نظام المواءمة interface system هو قدرتي على تشغيل الروبوت بشكل مستقل تماماً ، مع حركات صغيرة للرأس باستخدام عملية مواءمة بيانية و تصويرية للمستخدم سهلة الاستخدام للغاية".
رؤية العالم من خلال الكاميرات الموجودة في رأس الروبوت
وتُظهر عملية المواءمة المستندة إلى الويب web-based interface للمستخدمين كيف يبدو العالم من الكاميرات الموجودة في رأس الروبوت. حيث تسمح عناصر التحكم القابلة للنقر التي تظهر على الشاشة للمستخدمين بتحريك الروبوت في بيئة منزلية أو بيئة أخرى والتحكم في يدي الروبوت وأذرعه. فعندما يقوم المستخدمون بتحريك رأس الروبوت ، على سبيل المثال ، تعرض الشاشة مؤشر الماوس كزوج من مقل العيون لإظهار المكان الذي سينظر له الروبوت عند نقر المستخدم . و يتيح النقر فوق قرص يحيط بالأيدي الآلية للمستخدمين باختيار حركة ما. وأثناء قيادة الروبوت حول الغرفة ، تشير الخطوط التي تتبع المؤشر على الواجهة interface إلى الاتجاه الذي سينتقل إليه.
و يتيح إنشاء (الواجهة) عملية المواءمة interface حول أداء زر الماوس المفرد البسيط للأشخاص الذين يعانون من الإعاقات على نطاق واسع استخدام الواجهة دون جلسات تدريب طويلة.
و لقد أشار غرايس في تدوينة له إلى أن : " وجود عملية مواءمة interface يمكن من خلالها للأفراد الذين يعانون من مجموعة كبيرة من الإعاقات الجسدية أن يعملوا يعني أنه يمكننا توفير الوصول إلى مجموعة واسعة من الأشخاص " و يتابع في تدوينته قائلاً : " إنه شكل من أشكال التصميم العالمي ،و بسبب مقدرته و فعاليته الكبيرة ، فهو نظام معقد جداً ، كما أن التحدي الذي كان علينا التغلب عليه هو جعله متاحاً للأفراد الذين لديهم سيطرة محدودة للغاية على أجسامهم".
وفي حين أظهرت نتائج الدراسة ما قد حدده الباحثون للقيام به ، فإن كيمبKemp لا يمانع أبداً أنه من الممكن إجراء تحسينات على ذلك النظام . إذ أن النظام الحالي بطيء ، والأخطاء التي يرتكبها المستخدمون يمكن أن تخلق انتكاسات كبيرة. ومع ذلك ، فإنه يقول: "يمكن للناس استخدام هذه التكنولوجيا اليوم والاستفادة منها حقاً " .
كما اقترح إيفانز Evans أن تكلفة وحجم PR2 بحاجة إلى تخفيض كبير حتى يصبح النظام قابلاً للتطبيق من الناحية التجارية. و يقول كيمب Kemp إن هذه الدراسات تشير إلى نوع جديد من التكنولوجيا المساعدة.
و يضيف كيمب أخيراً : "إنه من المعقول بالنسبة لي وبناءً على هذه الدراسة أن بدائل الجسم الآلية يمكنها أن توفر فوائد كبيرة للمستخدمين".
المصدرالوسوم
المؤلف

هدفنا إغناء المحتوى العربي لأن القارئ العربي يستحق المعلومة الصحيحة والمفيدة، و التي تنشر الآن في أهم المواقع العالمية ،